Autonomous Marine Robotics

Blacktip
Rumblefish is a bio-inspired design based off the black tipped reef shark. The bio-inspired design used bio-mimicry to solve a number of underwater hydrodynamics and control problems faced by autonomous underwater craft.
The hull was a research project in and of itself, the goal being to figure out just how large and pressure / depth rated a hull could be produced with conventional FDM printing. The final hull pictured here, V20, is just under five feet long – with a designed operational depth down to 20 meters.
More information about the project is available at rumblefishrobotics.com.
Longfish
Longfish is my current main project. Individually the Longfish design is an entirely 3D printed autonomous drone. The initial goal of the project I being able to float a swarm of autonomous drones in the Puget Sound.
The proof of execution application is deploying a phased array of hydrophones, one hydrophone per drone, and then using the captured data to create a tunable synthetic aperture hydrophone redundantly formed from elements spread out over a half-kilometer or more.
Current status is that my workshop looks like a drone factory, with Longfish being assembled on every flat surface and, hanging from the rafters while waiting to be worked on.
Remotely Operated Marine Vehicles

Lanternfish
The Lanternfish is an open source, extensible, underwater robotics platform. The goal of the project was creating a cheap to build, easily modifiable, platform for getting people started with underwater robotics.
The open source project is housed at rumblefishrobotics.com.
Hatchetfish
Hatchetfish is a current project. It was kicked off to improve the user experience based on things learned from Lanternfish. It is a significantly simpler design to construct, and requires only very basic soldering and electronics skills. The mechanical design of also takes advantage of the speed and resolution of new large photopolymer printers to be both faster to print and construct, as well as much more sophisticated in form.
When the project is available for open sourced it will be available for download from rumblefishrobotics.com
Wearables

Torque
The Torque explored using the neck as a location for hosting a mobile life-logging device with an audio interface. Neck worn forms afford discrete, private, physical forms that are easily hidden by a collared shirt or clothing and easily mistaken for jewelry. Location the device on the neck also provides excellent biometric sensor placement, and enables logging of spatialized audio, as sensors can be located in opposition around the sagittal plane.
Rings
Ring location offers them a number of unique affordances. For this project I developed a wireless ring-based accessory enabling the user to conveniently and covertly observe and acknowledge incoming messages. The system also provided a subtle way for the user to annotate in life logging applications.
Device Escalation
Device escalation has been a reoccurring theme in my mobile work. The goal is developing a cohesive user experience that spans multiple devices by designing the experience so that it gradually increases its presence in the user's life. This work examined how escalation of mobile alerts could be improved by escalating the alert off the phone - first to a ring - and then to glasses. The escalation minimizes the amount the alerts intrude on the users life, and enables coverage without requiring the user maintain such tight proximity with their phone.

e-SUIT
The e-SUIT is a wearable computer incorporated into a traditional business suit. The goal of the system was to allow a user to strike a balance between the amount of functionality they used and the social weight they bore as a consequence. The work developed the concept of social weight for technology, and explored how device escalation could be used as a strategy for minimizing social weight.
Pressure Based Haptic Sensors
This project was conducted in 1997 while I was still an undergraduate, but it is a personal favorite project, and it was my first published work. I created a glove for sensing the absolute position of each of the users fingers. Most of the project was developing a sensor suitable for use on the body. In the end I used changes in pressure, as sealed chambers were deformed in order to measure the bend of the users fingers.
Phones and Accessories
Archimedes
The project explored redirecting the camera on the phone to provide gestural controls. The work developed into an exploration looking for the pinch-zoom touch screen equivalent gestures for augmented reality applications on the phone. Several example gestures for providing verniered control over depth, angle, and rotation were developed.
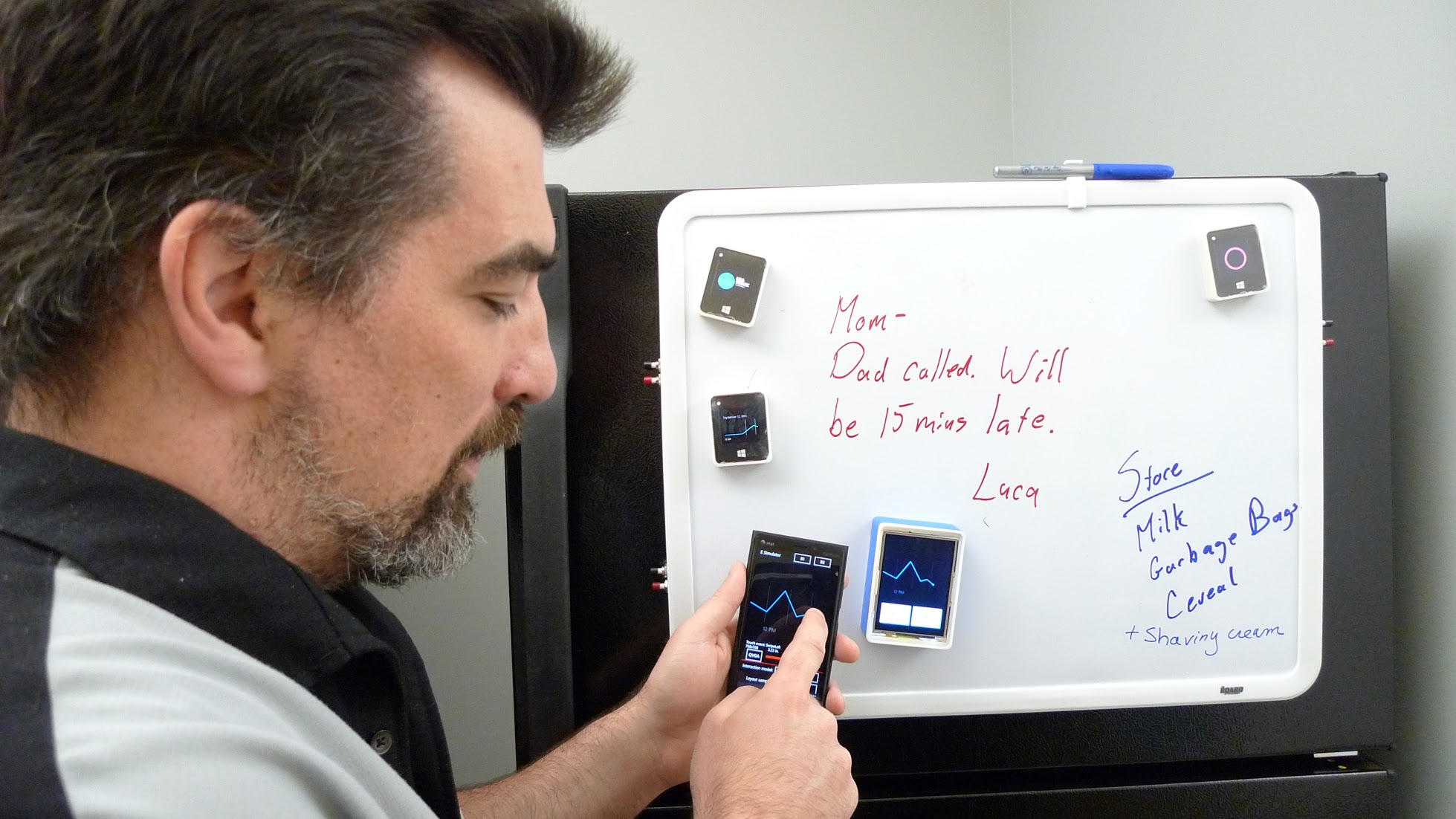
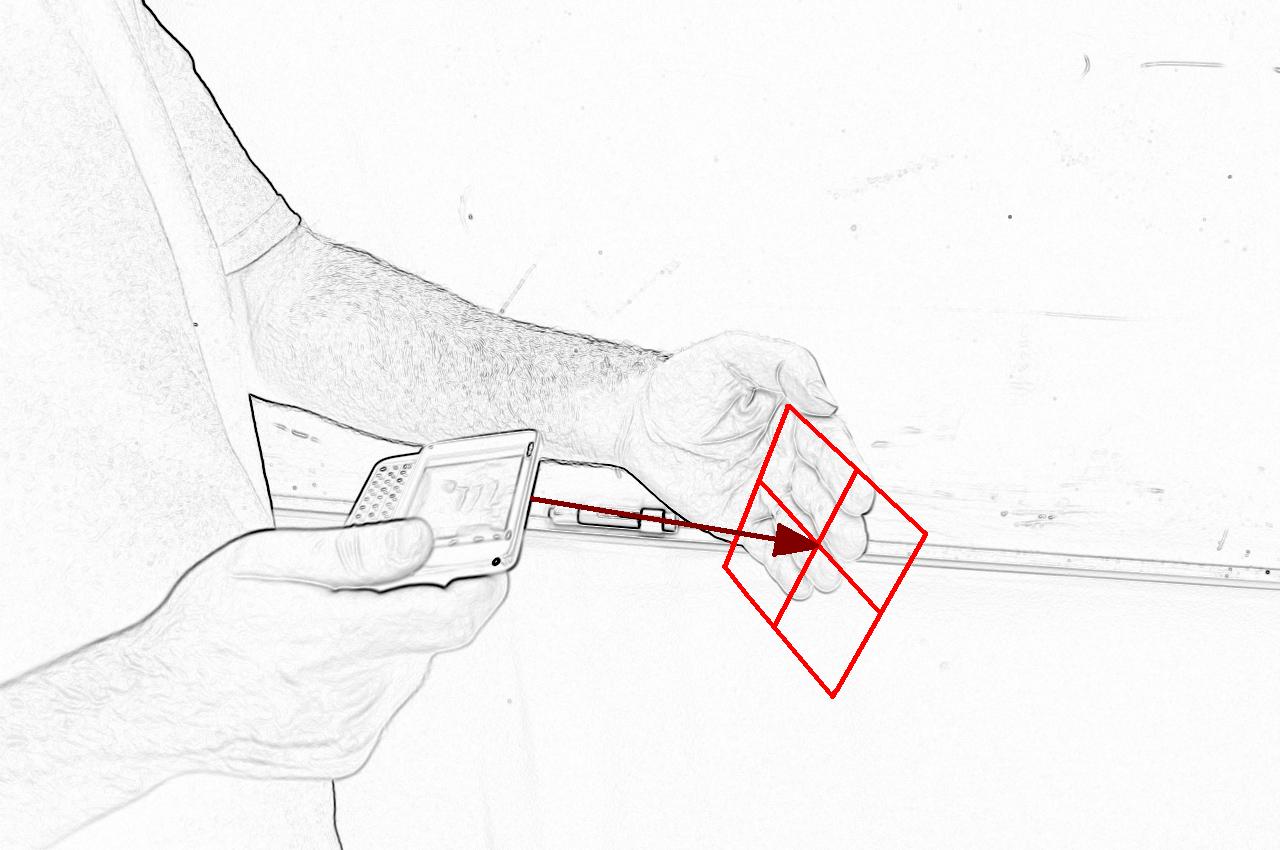
Escher
The project explored pushing live tiles, apps, and streaming data off of the phone and onto physical tiles found in the users environment.
Wearable Displays

Physical Crossovers
Bone conductors are cheap, capable of being integrated into a wide variety of physical forms, and provide a clear low frequency mono channel. My collaborators and I researched using both high frequency resonators and bone conductors as a physical crossover. The end goal was obtaining quality broad-spectrum sound out of a head worn device without requiring hardware coving the ear. Research explored mechanisms for vibration isolation, ideal actuator placement, and means of generating appropriate contact force for bone conductors.
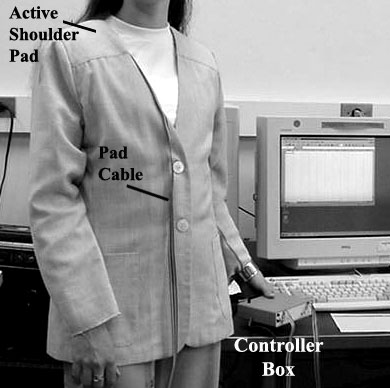
Vibrotactile Shoulderpad Display
This research explored issues of integrating a vibrotactile displays into a standard clothing insert, the shoulder pad. Research spanned merits and drawbacks of multiple construction techniques, and user studies were conducted to assess the overall efficacy and information carrying capacity of shoulder mounted vibrotactile displays.
Smart Clothing

Smart Hangers
Ease of maintenance and management of smart garments (garments with integrated electronics) will be crucial to their commercial viability. The SmartHanger was developed to addresses smart garments needs of easy garment charging, storage, and synchronization. The developed hangers were able to charge and communicate with the garments over a two-wire protocol.

Smart Tags
The SmartTag work was a collaboration predating development of current e-Textile prototyping systems like the LillyPad. The work developed manufacturing techniques for smart garments, specifically ways to construct smart garments using the existing garment industry’s infrastructure. SmartTags were proposed as a way of developing smart garments by integrating the electronics through sewn in modules.

Narnia
Smart hangers provided a way to take care of a large number of individual smart garments prototypes collectively. Narnia was developed as a way to interact with and manage a large collection of garments, both smart and conventional, in a way suitable for use in the home. Narnia, contained a smart garment management system and could house several dozen smart garments. The door of the cabinet provided the user with the an interface to see what was currently clean and ready to wear, out being cleaned, and would even make suggestions on available outfits based on past choices.
Tabletop User Interfaces
Deployable Displays
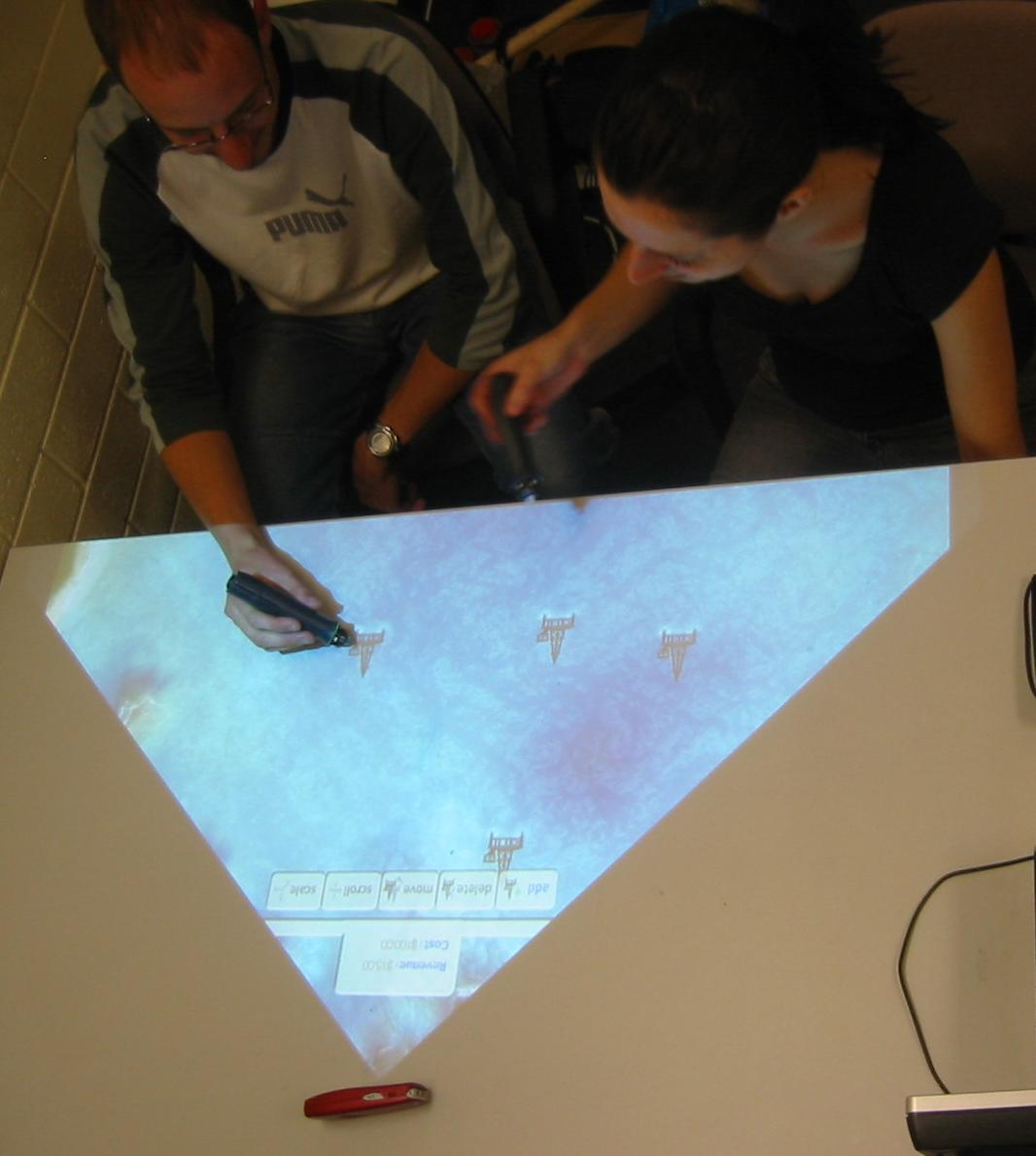
This project explored how mobile devices can best provide projected collaborative user interfaces on convenient horizontal surfaces. It appeared to the participants that their phone was generating a projected interactive surface. This let me study where the users deployed and re-deployed the phone when initially setting up a projected interface, and how deployment location impacted collaboration and user interface effectiveness. I was also able to look at what caused users to re-deploy, and where they redeployed, in response to variables such as number of collaborators, table height, and application.
Modeling Reach
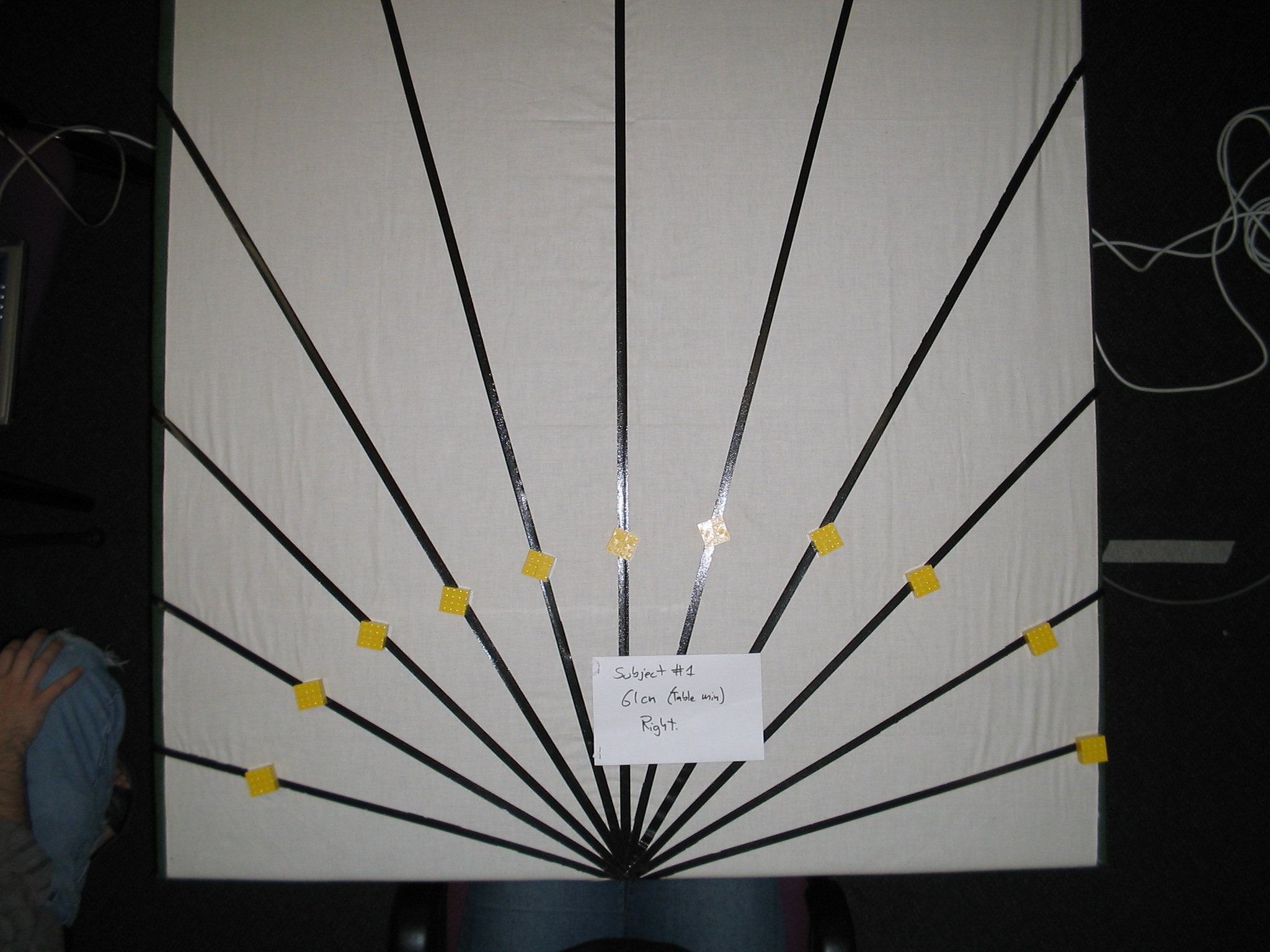
My interests in horizontal interactive surfaces lead me to research how variables like table size, shape, and collaborator distribution effect the user interaction with on table applications. I ran a number of studies testing on table reach, an using the results to develop mathematical models to quantifiably predict reachable space on the table based on the table’s height, shape, and the users anthropometric dimensions.
Predicting Table Usage
Building on my models predicting user reach, I ran studies observing table usage. From their results I developed models that could quantifiably predict where on the table a user would preferentially store, sort, and manipulate items, and how those regions and patterns of table use would change with the presence of collaborators.
Rethinking the Mouse Wheel
Locking Mouse Wheel
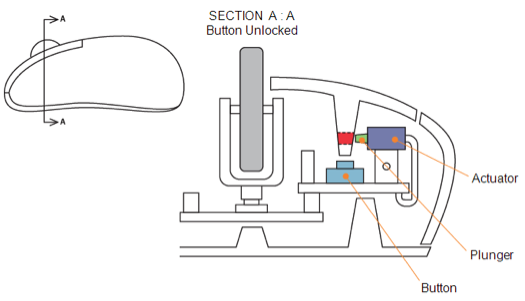
Currently mice are largely input devices. As part of an industrial design collaboration I explored ways for the mouse to afford the current usability of the area below the cursor. In the end I designed an electrically actuated bistable mechanical actuator to provide software control over locking the mouse buttons, preventing them from being depressed. Locking the button was used to afford the click-ability of the current selection.
Magnetic Detents
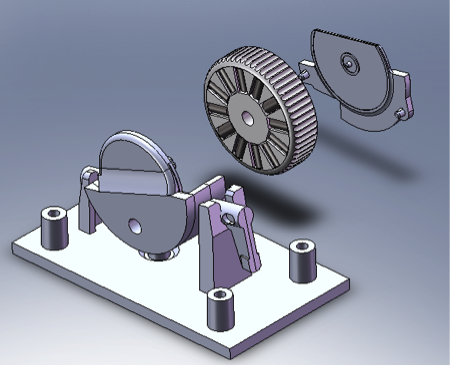
Detents are the little tactile “clicking” sensations you feel when spinning a mouse wheel. Detents help afford a quantitative sense to the angular rotation of the wheel. This project developed ways to magnetically generate detent force –providing a programmable number and strength of detents, as well as a way to lower COGs by magnetically tracking wheel rotation.
Robotic Components
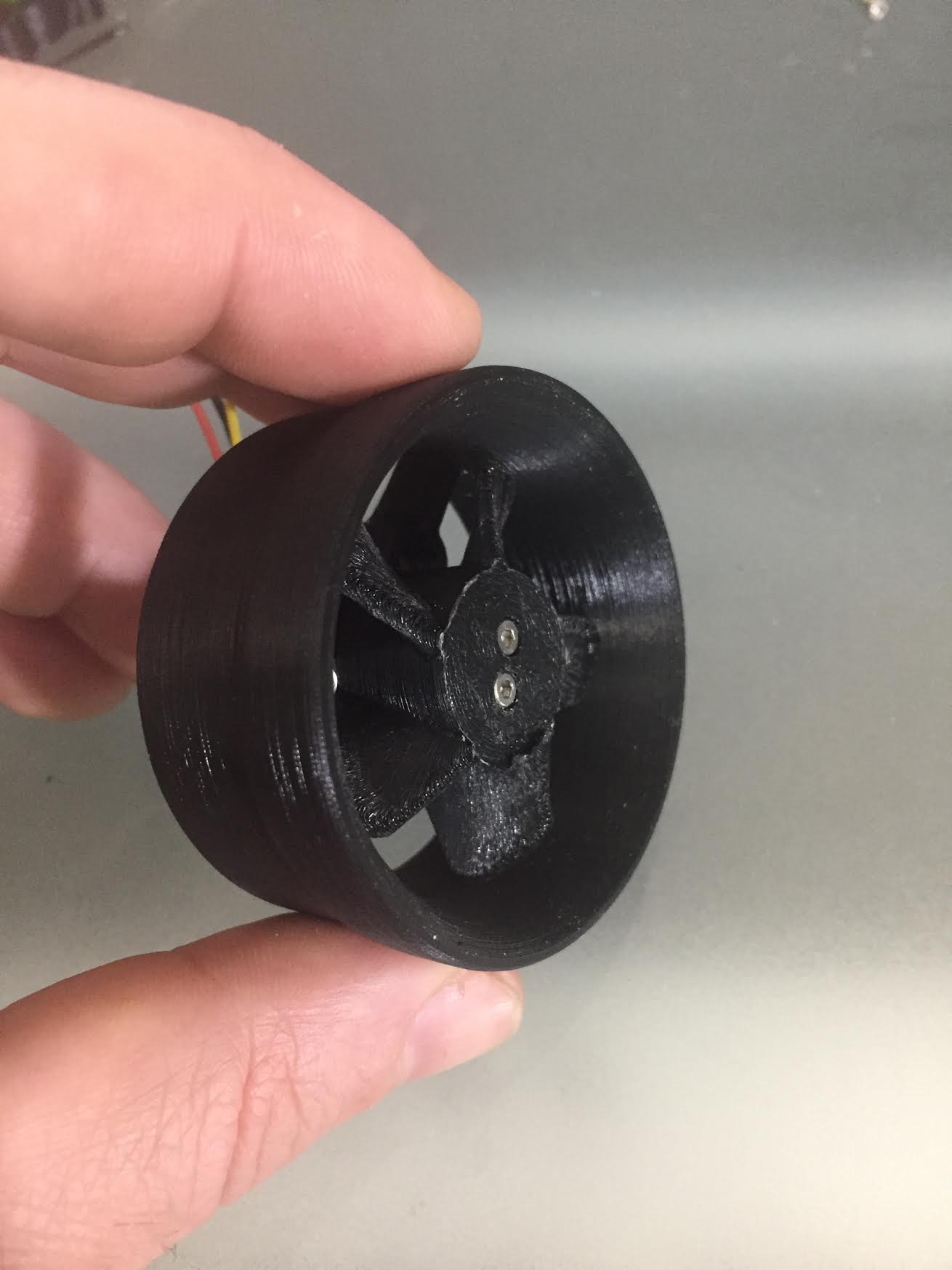
Thrusters
The micro thruster project was a project to create a tiny thruster to enable the creation of much smaller craft with fewer design constraints.
Oddly for multi-thruster designs, the available thruster packages tend to drive the design. Most multi-thruster designs end up using the same thrusters for both orientation and mobility thrust. This means larger thrusters get used, with changes that ripple through the designs scaling up size and weight for on and under water Drones, ROVs, and UUVs.
The thruster designs are open source, and the designs are available from rumblefishrobotics.com.