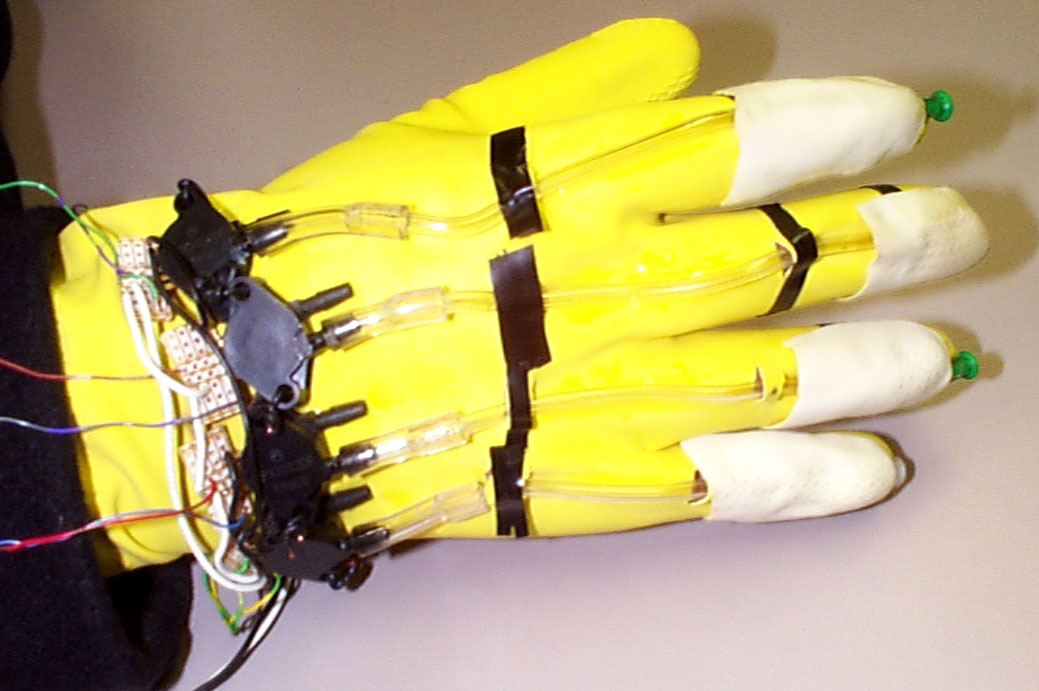
Using Pressure to Track Finger Position
This project was conducted in 1997 while I was still an undergraduate at the University of Washington. As part of some discretionary research elective EE399 course I chose to build a glove that tracked the absolute position of the hand.
These days the AR and VR applications are obvious, but back then explaining that I was making a crazy looking glove because I wanted to walk around in virtual world was just shy of enough to get committed for a long weekend someplace nice with padded walls. I guess its kind of funny that 5 years later I was going to grad school in a lab full of people working on Virtual and Augmented reality.