Initially I was drawn to Rays for a bio-inspired design. However, eventually I would like to use the active ballast to have the AUV be able to glide over large distances and Rays don’t really glide through the water in the right way.
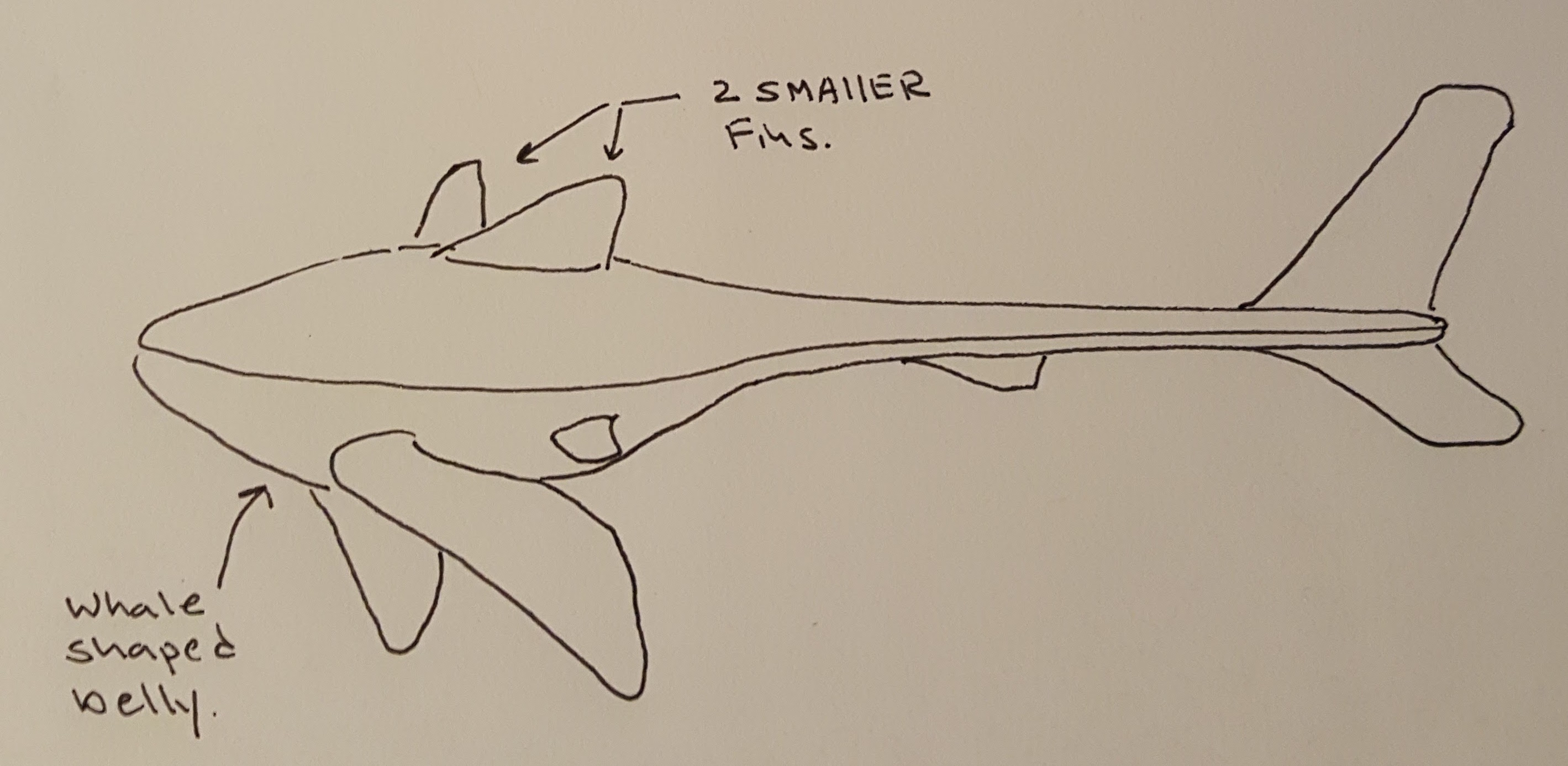
So right now I am thinking I will use the general design of a small shark. After some quick measurements though I’m going to blow out its belly to be more like a grey whale. That should still give more storage and decent flow over the frame.
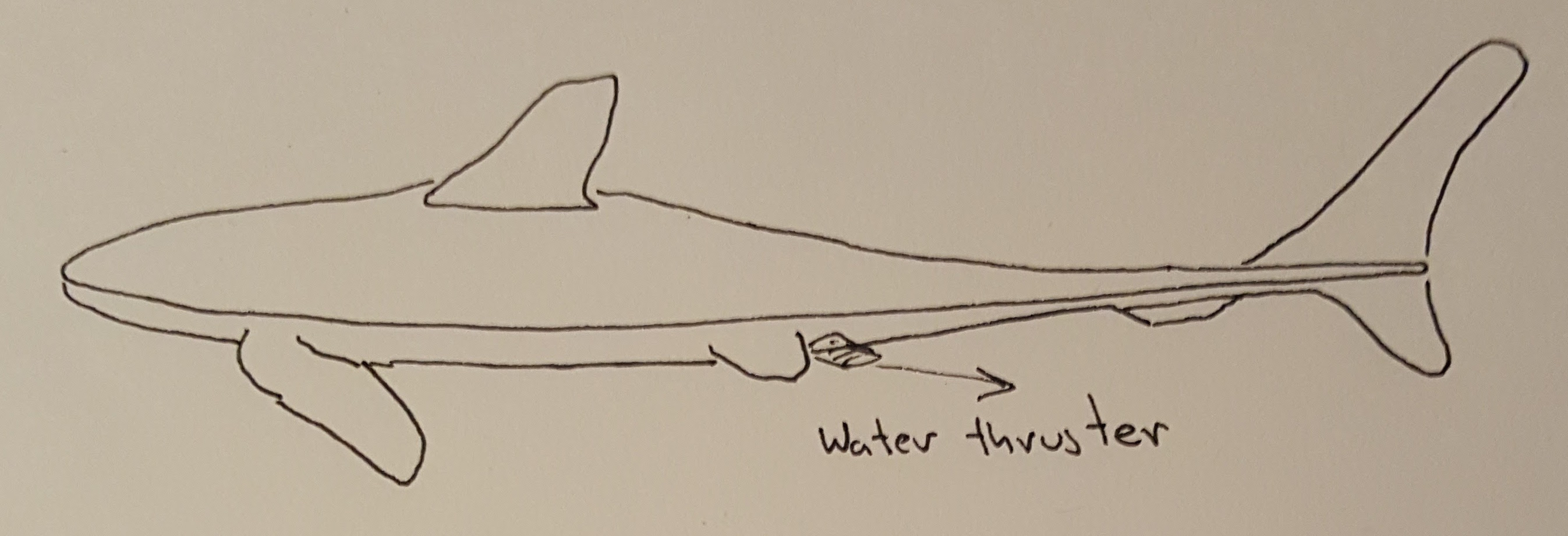
I am toying about adding two smaller fins – if I am right it could help with glide stability – but man it does not look weird. I will probably ditch the two fins, but keep the long thin tail. Since I am going to be printing all the hull mold pieces in chunks on my 3d printer – I also am strongly incentivized to minimize hull surface area.